在計算機行業(yè)深度研究的框架下,軟件開發(fā)作為核心技術(shù)領(lǐng)域,正成為推動汽車智能化與工業(yè)數(shù)字化兩大趨勢的關(guān)鍵驅(qū)動力。本文將從軟件開發(fā)的技術(shù)演進、應(yīng)用場景及未來趨勢三個維度,探討其在汽車智能化與工業(yè)數(shù)字化專題中的核心作用。
一、軟件開發(fā)的技術(shù)演進:從傳統(tǒng)架構(gòu)到云原生
過去十年,軟件開發(fā)經(jīng)歷了從單體架構(gòu)到微服務(wù)、從本地部署到云原生的深刻變革。在汽車智能化領(lǐng)域,這一演進表現(xiàn)為車載軟件從封閉的嵌入式系統(tǒng)向開放的可升級架構(gòu)轉(zhuǎn)型。以特斯拉為代表的整車廠通過OTA(空中下載)技術(shù)實現(xiàn)軟件持續(xù)迭代,使汽車從機械產(chǎn)品演變?yōu)椤拜喿由系闹悄芙K端”。在工業(yè)數(shù)字化領(lǐng)域,工業(yè)互聯(lián)網(wǎng)平臺的興起催生了基于容器化和DevOps的工業(yè)軟件新范式,支持制造業(yè)實現(xiàn)柔性生產(chǎn)和遠程運維。
二、軟件開發(fā)在汽車智能化中的應(yīng)用場景
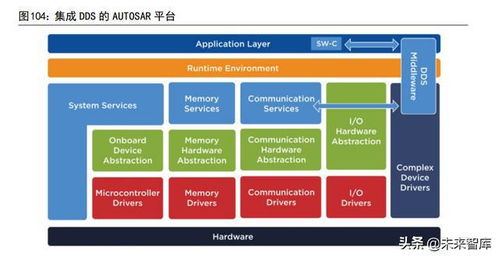
- 智能座艙系統(tǒng):通過分層軟件架構(gòu)(硬件抽象層、系統(tǒng)服務(wù)層、應(yīng)用框架層)實現(xiàn)多屏聯(lián)動、語音交互、人臉識別等功能,為用戶提供個性化駕乘體驗。
- 自動駕駛系統(tǒng):采用感知-決策-控制的軟件閉環(huán),融合計算機視覺、傳感器融合和深度學(xué)習(xí)算法,實現(xiàn)環(huán)境感知、路徑規(guī)劃和車輛控制。典型代表包括百度Apollo、Waymo等開源平臺。
- 車聯(lián)網(wǎng)生態(tài):基于V2X(車與萬物互聯(lián))通信協(xié)議開發(fā)的軟件系統(tǒng),實現(xiàn)車輛與基礎(chǔ)設(shè)施、其他車輛及行人的實時數(shù)據(jù)交換,為智能交通系統(tǒng)奠定基礎(chǔ)。
三、軟件開發(fā)在工業(yè)數(shù)字化中的實踐路徑
- 數(shù)字孿生技術(shù):通過構(gòu)建物理實體的虛擬模型,利用實時數(shù)據(jù)驅(qū)動仿真分析,實現(xiàn)生產(chǎn)流程的優(yōu)化預(yù)測。西門子Teamcenter、達索3DEXPERIENCE等平臺提供了完整的數(shù)字孿生開發(fā)工具鏈。
- 工業(yè)APP生態(tài):基于低代碼/無代碼平臺的快速開發(fā)模式,讓領(lǐng)域?qū)<夷軌蜃灾鳂?gòu)建專用工業(yè)應(yīng)用,顯著降低數(shù)字化轉(zhuǎn)型門檻。
- 邊緣計算架構(gòu):針對工業(yè)現(xiàn)場的低延遲需求,開發(fā)部署在邊緣節(jié)點的輕量級軟件,實現(xiàn)數(shù)據(jù)本地處理與云端協(xié)同的混合計算模式。
四、未來趨勢與挑戰(zhàn)
- 軟件定義一切(SDx)成為共識:汽車正在演變?yōu)椤败浖x汽車”(SDV),工廠也在向“軟件定義制造”轉(zhuǎn)型,軟件開發(fā)能力成為核心競爭力。
- 安全與實時性挑戰(zhàn):功能安全(ISO 26262)和信息安全(ISO 21434)標準對汽車軟件提出更高要求;工業(yè)領(lǐng)域?qū)崟r操作系統(tǒng)的需求日益迫切。
- 開發(fā)模式創(chuàng)新:AIGC輔助編程、元宇宙協(xié)同開發(fā)等新技術(shù)正在重塑軟件開發(fā)流程,汽車與工業(yè)領(lǐng)域需要建立適應(yīng)自身特點的開發(fā)方法論。
在汽車智能化與工業(yè)數(shù)字化的交匯點上,軟件開發(fā)已從輔助工具升級為核心戰(zhàn)略。未來,掌握跨域融合軟件能力的企業(yè)將在新一輪產(chǎn)業(yè)變革中占據(jù)主導(dǎo)地位,而持續(xù)的技術(shù)創(chuàng)新與生態(tài)建設(shè)將是保持競爭力的關(guān)鍵所在。